Framework Pipeline
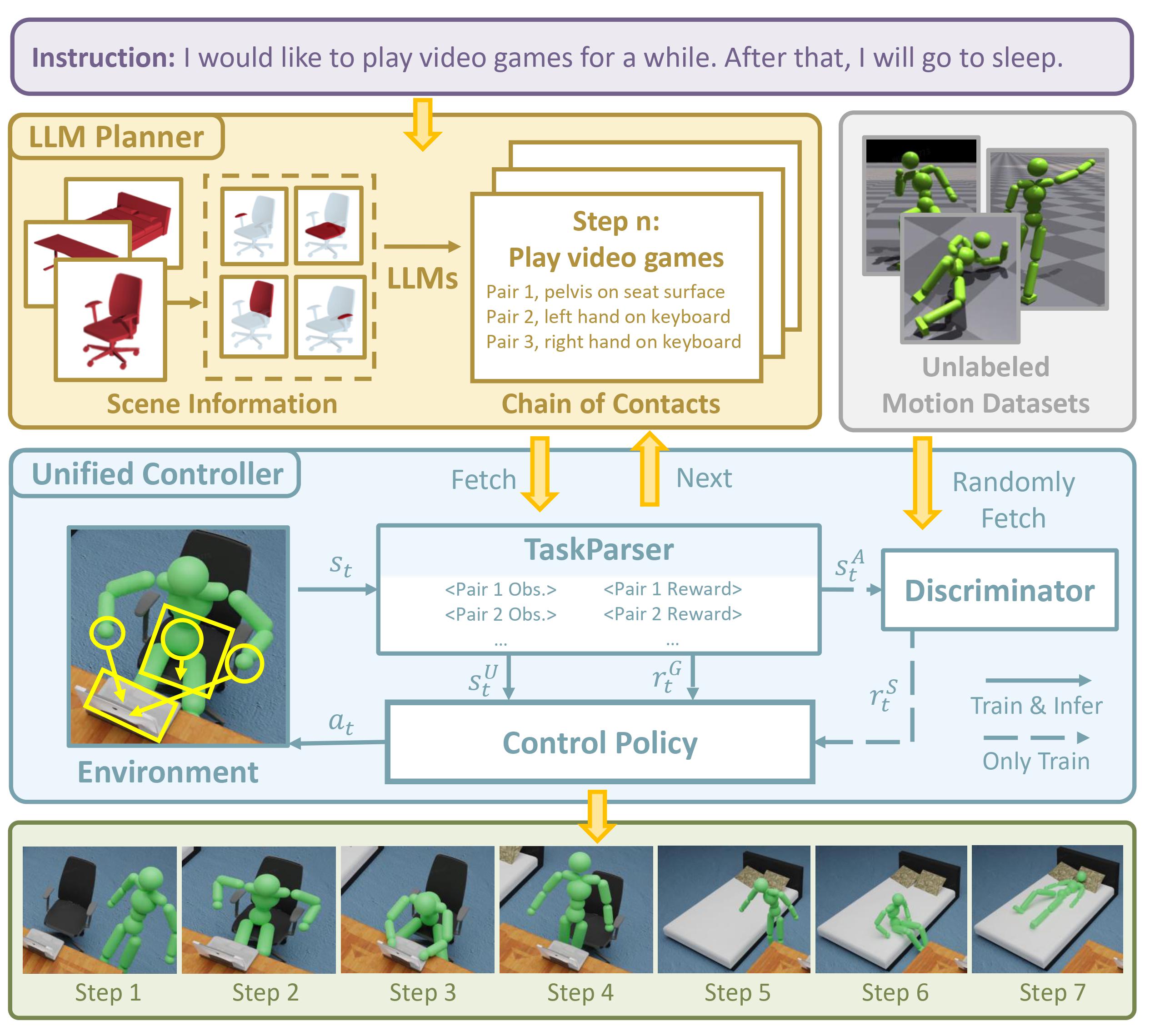
The whole pipeline consists of two major components: the LLM Planner and the Unified Controller. The LLM planner takes language inputs and background scenario information as inputs and outputs multi-step plans in the form of a Chain of Contacts. The Unified Controller then executes task plans step-by-step and outputs interaction movements.